Getting Started¶
This section is for you if you are a developer and are using Moildev Library for the first time.
Installation¶
You have two options for install Moildev library. The first option to access the Moildev library is directly install from the PyPI distribution. You just need to execute the command bellow:
$ pip install Moildev
Alternatively, you can choose the second option, which involves cloning the Moildev repository directly from GitHub.
$ git clone https://github.com/perseverance-tech-tw/moildev.git
Basic Concept¶
The Fisheye lens, also known as the Fisheye image sensor (FIS), is a unique ultra-wide-angle lens with a short focal length that generates considerable optical distortion and is designed to provide a wide, panoramic, or hemispherical image.
The large field of view is the most important characteristic. With a FOV of more than 180 degrees, a Fisheye camera (also known as a Fisheye image sensor, or FIS) can capture a clear image, but a severer barrel distortion comes along.
According to Prof. Chuang-Jan Chang, the approach to displaying Fisheye camera images incorporates multicollimator metrology and cartography in order to methodically characterize the Fisheye camera’s projection mechanism.
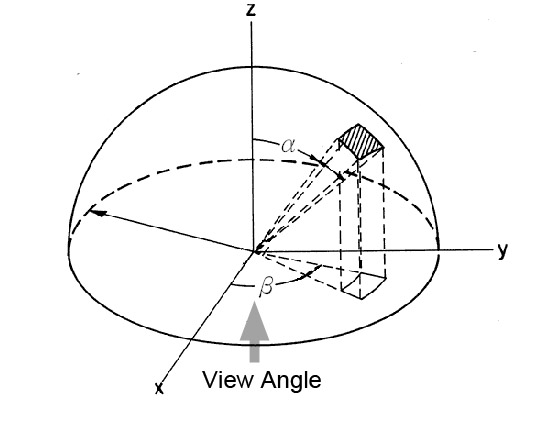
The hemisphere coordinate system is produced by the Fisheye camera in our suggested technique. Hence, the position of an imaged point referring to the principal point on the image plane directly reflects its corresponding zenithal distance (alpha). and azimuthal distance (beta) of the sight ray in space to normalize the imaged point onto a small sphere presented in the following figure:
Moil dash camera¶
Based on the coordinate system, the angles respectively defined by incident rays and the optical axis are the zenithal angle (alpha) and the azimuthal angle (beta), which are the angles surrounding the optical axis.
It has a relationship with the coordinate system X, Y, and Z, where the optical axis is defined by the Z-axis. For the zenithal angle, it is the angle from the vertical optical axis to the X- and Y-axes, as shown in Figure A.
Whereas the azimuthal angle is defined as the angle of positive Y as the reference point with a value of 0 degrees and the Z-axis is used as the rotation axis, as shown in Figure B. The rotation around the optical axis is the angle of the Y axis, starting from the positive direction and clockwise around the X axis.
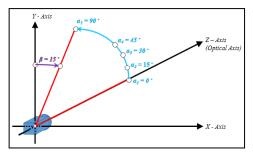
A.Zenithal Angle¶ |
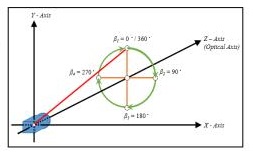
B.Azimuthal Angle¶ |